




 2026.6.12 本研究室とJAXA・東京大学との共同研究について,Youtubeにビデオが公開されました.
2026.6.12 本研究室とJAXA・東京大学との共同研究について,Youtubeにビデオが公開されました. 2026.4.30 本研究室の新興国を対象にしたリハビリロボット開発プロジェクトがNational Academy of Medicine・AMEDより”National Academy of Medicine Healthy Longevity Catalyst Innovator (Catalyst Award)”を受賞しました
2026.4.30 本研究室の新興国を対象にしたリハビリロボット開発プロジェクトがNational Academy of Medicine・AMEDより”National Academy of Medicine Healthy Longevity Catalyst Innovator (Catalyst Award)”を受賞しました 2026.4.23 本研究室の城戸健君が日本機械学会・ICMDT2025兼第24回機素潤滑設計部門講演会での発表に関して,若手優秀賞講演フェロー賞を受賞しました
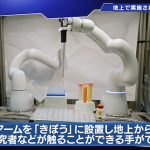
2026.4.23 本研究室の城戸健君が日本機械学会・ICMDT2025兼第24回機素潤滑設計部門講演会での発表に関して,若手優秀賞講演フェロー賞を受賞しました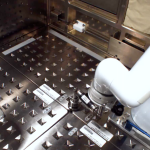 2026.4.16 JAXA・東京大学との共同研究プロジェクトのISSでの作業状況が更新されました.
2026.4.16 JAXA・東京大学との共同研究プロジェクトのISSでの作業状況が更新されました. 2026.3.9 JAXA・東京大学との共同研究の一部状況が公開されました.ISSでの作業が進められています.
2026.3.9 JAXA・東京大学との共同研究の一部状況が公開されました.ISSでの作業が進められています.